- 浏览: 886882 次
-

文章分类
最新评论
-
咖啡骑士:
kao,真行,解决了我的问题,谢谢!
JBoss ERROR [URLDeploymentScanner] Incomplete Deployment listing:--- MBeans waiting for other MBeans --- 的解决办法 -
anity:
你试过吗????
在Android系统中调用系统前置摄像头 -
liuqun_567:
http://liuqun-567.iteye.com/blo ...
用纯CSS3实现Path华丽动画 -
lenomon:
上面讲的还可以,可以看看这篇Android2.2及2.3版本调 ...
在Android系统中调用系统前置摄像头 -
技术宅男:
GeoLiteCity和Geoip,他们的区别是什么?感觉功能 ...
使用GEOIP进行用户IP的分析
Smooth Function
http://mathworld.wolfram.com/SmoothFunction.html
| Smooth Function | |
A smooth function is a
function that has
continuous
derivatives up to some desired order over some domain. A function can therefore be said to be smooth over a restrictedinterval such as or
or![[a,b]](http://mathworld.wolfram.com/images/equations/SmoothFunction/Inline2.gif) . The number of continuous derivatives necessary for a function to be considered smooth depends on the
problem at hand, and may vary from two to infinity. A function for which all orders of derivatives are continuous is called aC-infty-function.
. The number of continuous derivatives necessary for a function to be considered smooth depends on the
problem at hand, and may vary from two to infinity. A function for which all orders of derivatives are continuous is called aC-infty-function.
SEE ALSO: C-infty-Function, Continuous Function, Derivative, Function
http://en.wikipedia.org/wiki/Smooth_function

In mathematical analysis, a differentiability class is a classification of functions according to the properties of their derivatives. Higher order differentiability classes correspond to the existence of more derivatives. Functions that have derivatives of all orders are called smooth.
Most of this article is about real-valued functions of one real variable. A discussion of the multivariable case is presented towards the end.
Contents[hide] |
[edit] Differentiability classes
Consider an open set on the real line and a function f defined on that set with real values. Let k be a non-negative integer. The function f is said to be of class Ck if the derivatives f', f'', ..., f(k) exist and are continuous (the continuity is automatic for all the derivatives except for f(k)). The function f is said to be of class C∞, or smooth, if it has derivatives of all orders.[1]f is said to be of class Cω, or analytic, if f is smooth and if it equals its Taylor series expansion around any point in its domain.
To put it differently, the class C0 consists of all continuous functions. The class C1 consists of all differentiable functions whose derivative is continuous; such functions are called continuously differentiable. Thus, a C1 function is exactly a function whose derivative exists and is of class C0. In general, the classes Ck can be defined recursively by declaring C0 to be the set of all continuous functions and declaring Ck for any positive integer k to be the set of all differentiable functions whose derivative is in Ck−1. In particular, Ck is contained in Ck−1 for every k, and there are examples to show that this containment is strict. C∞ is the intersection of the sets Ck as k varies over the non-negative integers. Cω is strictly contained in C∞; for an example of this, see bump function or also below.
[edit] Examples



The function
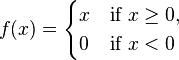
is continuous, but not differentiable at  , so it is of class
C0 but not of class C1.
, so it is of class
C0 but not of class C1.
The function
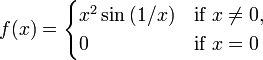
is differentiable, with derivative

Because cos(1/x) oscillates as x approaches zero, f ’(x) is not continuous at zero. Therefore, this function is differentiable but not of class C1. Moreover, if one takes f(x) = x3/2 sin(1/x) (x ≠ 0) in this example, it can be used to show that the derivative function of a differentiable function can be unbounded on a compact set and, therefore, that a differentiable function on a compact set may not be locally Lipschitz continuous.
The functions
where k is even, are continuous and k times differentiable at all
x. But at they are not (k+1) times differentiable, so they are of class
C k but not of class C j where j>k.
The exponential function is analytic, so, of class Cω. The trigonometric functions are also analytic wherever they are defined.
The function

is smooth, so of class C∞, but it is not analytic at  , so it is not of class
Cω. The function f is an example of a smooth function with
compact support.
, so it is not of class
Cω. The function f is an example of a smooth function with
compact support.
[edit] Multivariate differentiability classes
Let n and m be some positive integers. If f is a function from an open subset of
Rn with values in Rm, then
f has component functions f1, ..., fm. Each of these may or may not have
partial derivatives. We say that f is of class Ck if all of the partial derivatives
 exist and are continuous, where each of
exist and are continuous, where each of
 is an integer between 1 and
n, each of
is an integer between 1 and
n, each of  is an integer between 0 and
k,
is an integer between 0 and
k,  .[1]
The classes C∞ and Cω are defined as before.[1]
.[1]
The classes C∞ and Cω are defined as before.[1]
These criteria of differentiability can be applied to the transition functions of a differential structure. The resulting space is called a Ckmanifold.
If one wishes to start with a coordinate-independent definition of the class Ck, one may start by considering maps between Banach spaces. A map from one Banach space to another is differentiable at a point if there is an affine map which approximates it at that point. The derivative of the map assigns to the point x the linear part of the affine approximation to the map at x. Since the space of linear maps from one Banach space to another is again a Banach space, we may continue this procedure to define higher order derivatives. A map f is of class Ck if it has continuous derivatives up to order k, as before.
Note that Rn is a Banach space for any value of n, so the coordinate-free approach is applicable in this instance. It can be shown that the definition in terms of partial derivatives and the coordinate-free approach are equivalent; that is, a function f is of class Ck by one definition iff it is so by the other definition.
[edit] The space of Ck functions
Let D be an open subset of the real line. The set of all Ck functions defined on
 and taking real values is a
Fréchet space with the countable family of
seminorms
and taking real values is a
Fréchet space with the countable family of
seminorms

where K varies over an increasing sequence of compact sets whose union is D, and m = 0, 1, …, k.
The set of C∞ functions over also forms a Fréchet space. One uses the same seminorms as above, except
that  is allowed to range over all non-negative integer values.
is allowed to range over all non-negative integer values.
The above spaces occur naturally in applications where functions having derivatives of certain orders are necessary; however, particularly in the study of partial differential equations, it can sometimes be more fruitful to work instead with the Sobolev spaces.
[edit] Parametric continuity
Parametric continuity is a concept applied to parametric curves describing the smoothness of the parameter's value with distance along the curve.
[edit] Definition
A curve can be said to have Cn continuity if

is continuous of value throughout the curve.
As an example of a practical application of this concept, a curve describing the motion of an object with a parameter of time, must have C1 continuity for the object to have finite acceleration. For smoother motion, such as that of a camera's path while making a film, higher levels of parametric continuity are required.
[edit] Order of continuity


The various order of parametric continuity can be described as follows:[2]
- C−1: curves include discontinuities
- C0: curves are joined
- C1: first derivatives are equal
- C2: first and second derivatives are equal
- Cn: first through nth derivatives are equal
The term parametric continuity was introduced to distinguish it from geometric continuity (Gn) which removes restrictions on the speed with which the parameter traces out the curve.[3]
[edit] Geometric continuity
The concept of geometrical or geometric continuity was primarily applied to the conic sections and related shapes by mathematicians such as Leibniz, Kepler, and Poncelet. The concept was an early attempt at describing, through geometry rather than algebra, the concept of continuity as expressed through a parametric function.
The basic idea behind geometric continuity was that the five conic sections were really five different versions of the same shape. An ellipse tends to a circle as the eccentricity approaches zero, or to a parabola as it approaches one; and a hyperbola tends to a parabola as the eccentricity drops toward one; it can also tend to intersecting lines. Thus, there was continuity between the conic sections. These ideas led to other concepts of continuity. For instance, if a circle and a straight line were two expressions of the same shape, perhaps a line could be thought of as a circle of infinite radius. For such to be the case, one would have to make the line closed by allowing the point x = ∞ to be a point on the circle, and for x = +∞ and x = −∞ to be identical. Such ideas were useful in crafting the modern, algebraically defined, idea of the continuity of a function and of ∞.
[edit] Smoothness of curves and surfaces
A curve or surface can be described as having Gn continuity, n being the increasing measure of smoothness. Consider the segments either side of a point on a curve:
- G0: The curves touch at the join point.
- G1: The curves also share a common tangent direction at the join point.
- G2: The curves also share a common center of curvature at the join point.
In general, Gn continuity exists if the curves can be reparameterized to have Cn (parametric) continuity.[4] A reparametrization of the curve is geometrically identical to the original; only the parameter is affected.
Equivalently, two vector functions  and
and
 have
Gn continuity if
have
Gn continuity if  and
and
 , for a scalar
, for a scalar
 (i.e., if the direction, but not necessarily the magnitude, of the two vectors is equal).
(i.e., if the direction, but not necessarily the magnitude, of the two vectors is equal).
While it may be obvious that a curve would require G1 continuity to appear smooth, for good aesthetics, such as those aspired to in architecture and sports car design, higher levels of geometric continuity are required. For example, reflections in a car body will not appear smooth unless the body has G2 continuity.[citation needed]
A rounded rectangle (with ninety degree circular arcs at the four corners) has G1 continuity, but does not have G2 continuity. The same is true for a rounded cube, with octants of a sphere at its corners and quarter-cylinders along its edges. If an editable curve with G2 continuity is required, then cubic splines are typically chosen; these curves are frequently used in industrial design.
[edit] Smoothness
[edit] Relation to analyticity
While all analytic functions are smooth on the set on which they are analytic, the above example shows that the converse is not true for functions on the reals: there exist smooth real functions which are not analytic. For example, the Fabius function is smooth but not analytic at any point. Although it might seem that such functions are the exception rather than the rule, it turns out that the analytic functions are scattered very thinly among the smooth ones; more rigorously, the analytic functions form a meagre subset of the smooth functions. Furthermore, for every open subset A of the real line, there exist smooth functions which are analytic on A and nowhere else.
It is useful to compare the situation to that of the ubiquity of transcendental numbers on the real line. Both on the real line and the set of smooth functions, the examples we come up with at first thought (algebraic/rational numbers and analytic functions) are far better behaved than the majority of cases: the transcendental numbers and nowhere analytic functions have full measure (their complements are meagre).
The situation thus described is in marked contrast to complex differentiable functions. If a complex function is differentiable just once on an open set it is both infinitely differentiable and analytic on that set.
[edit] Smooth partitions of unity
Smooth functions with given closed support are used in the construction of smooth partitions of unity (see partition of unity and topology glossary); these are essential in the study of smooth manifolds, for example to show that Riemannian metrics can be defined globally starting from their local existence. A simple case is that of a bump function on the real line, that is, a smooth function f that takes the value 0 outside an interval [a,b] and such that

Given a number of overlapping intervals on the line, bump functions can be constructed on each of them, and on semi-infinite intervals (-∞, c] and [d,+∞) to cover the whole line, such that the sum of the functions is always 1.
From what has just been said, partitions of unity don't apply to holomorphic functions; their different behavior relative to existence and analytic continuation is one of the roots of sheaf theory. In contrast, sheaves of smooth functions tend not to carry much topological information.
[edit] Smooth functions between manifolds
Smooth maps between
smooth manifolds may be defined by means of
charts, since the idea of smoothness of function is independent of the particular chart used. If
F is a map from an m-manifold M to an n-manifold
N, then F is smooth if, for every  , there is a chart
, there is a chart
 in
M containing p and a chart
in
M containing p and a chart  in
N containing F(p) with
in
N containing F(p) with  , such that
, such that
 is smooth from
is smooth from
 to
to
 as a function from
as a function from
 to
to
 .
.
Such a map has a first derivative defined on tangent vectors; it gives a fibre-wise linear mapping on the level of tangent bundles.
[edit] Smooth functions between subsets of manifolds
There is a corresponding notion of smooth map for arbitrary subsets of manifolds. If
 is a
function whose
domain and
range are subsets of manifolds
is a
function whose
domain and
range are subsets of manifolds  and
and
 respectively.
respectively.
 is said to be
smooth if for all
is said to be
smooth if for all  there is an open set
there is an open set
 with
with
 and a smooth function
and a smooth function
 such that
such that
 for all
for all
 .
.
[edit] See also
[edit] References
|
|
This article includes a list of references, related reading or external links, but its sources remain unclear because it lacks inline citations. Please improve this article by introducing more precise citations. (May 2009) |
- ^ a b c Warner (1883), p. 5, Definition 1.2.
- ^ Parametric Curves
- ^ (Bartels, Beatty & Barsky 1987, Ch.13)
- ^ Brian A. Barsky and Tony D. DeRose, "Geometric Continuity of Parametric Curves: Three Equivalent Characterizations," IEEE Computer Graphics and Applications, 9(6), Nov. 1989, pp. 60–68.
-
 This articleincorporates text from a publication now
in the
public domain:Chisholm, Hugh, ed (1911).
Encyclopædia Britannica (11th ed.). Cambridge University Press.
This articleincorporates text from a publication now
in the
public domain:Chisholm, Hugh, ed (1911).
Encyclopædia Britannica (11th ed.). Cambridge University Press.
- Guillemin, Pollack. Differential Topology. Prentice-Hall (1974).
- Warner, Frank Wilson (1983). Foundations of differentiable manifolds and Lie groups. Springer. ISBN9780387908946.


发表评论

相关推荐
designed to minimize a smooth function subject to constraints, which may include simple bounds on the variables, linear constraints and smooth nonlinear constraints. (NPSOL may also be used for ...
### 低秩矩阵恢复基于平滑函数逼近的关键知识点 #### 一、研究背景与动机 在数据科学领域,特别是机器学习、神经网络、计算机视觉等多个领域中,通过矩阵分析来学习内在的数据结构变得越来越重要。...
order descent methods are the most robust, fast and reliable approaches for nonlinear optimization of a general smooth function. However, in the context of computer vision, 2 nd order descent methods ...
smoothScroll.js 是极小的,符合标准的平滑滚动脚本,无依赖,支持 Firefox, Chrome, IE10, Opera 和 Safari。使用:[removed][removed]示例:var smoothScroll = require('smoothscroll'); var exampleBtn = ...
5. **光滑函数(smooth function)**:在优化问题中,光滑函数是指具有连续导数的函数,通常用于保证优化算法的稳定性和收敛性。在功率分配问题中,光滑函数可能被用来确保算法在寻找最佳功率配置时有良好的行为。 ...
"J", "G", "H", 和 "Sf" 可能分别代表不同的组成部分,如雅可比矩阵(Jacobian)、梯度(Gradient)、Hessian矩阵或某种平滑函数(Smooth function)。 综合来看,这个压缩包包含了一系列用于多维优化的MATLAB脚本...
if ( function_exists( 'get_smooth_slider' ) ) { get_smooth_slider(); } 如果你想要幻灯片显示在主页列表文章之前,那么,你就把代码复制到如下代码之前: if(have_posts()) : while(have_posts()) : the_...
混杂系统是实际系统中一类重要的模型,具有广泛的应用领域,例如制造业、空中交通管理系统、机器人技术等。混杂系统的研究涉及多个学科领域,包括系统控制、优化、非光滑分析等。 在混杂系统的研究中,"生存域"是一...
function smoothScroll(targetY) { const startY = window.pageYOffset; const endY = targetY; const distance = endY - startY; const duration = 1000; // 滚动持续时间,单位毫秒 let start = null; ...
function [smoothedY] = smoothLine(x, y, windowSize, method) % 参数检查和预处理 % ... % 根据指定的方法(如'moving_average', 'spline'等)进行平滑处理 switch lower(method) case 'moving_average' %...
The idea was to create several points in 2d, and then map them to 3d with some smooth function, and then to see what the algorithm would find when it mapped the points back to 2d.
function smoothScroll(target) { const speed = 60; // 每帧滚动的距离,可以根据需要调整 const duration = 1000; // 动画持续的时间,单位为毫秒 const targetPosition = document.querySelector(target)....
objective function using the Genetic Algorithm (GA) function in the Genetic Algorithm and Direct Search Toolbox. Traditional derivative-based optimization methods, like those found in the ...
simplr-smoothscroll, 在所有浏览器中,平滑滚动 simplr-smoothscroll 演示程序要求jquery鼠标滚轮用法$(function () { $.srSmoothscroll({ // defaults step: 55, sp
erties of Lambert W function the implicitly dened model has been converted into a piecewise smooth system with explicit denition, and the global dynamic behavior is theoretically examined. The disease...
window.addEventListener('load', function() { new SmoothScroll(); }); ``` 3. **设置配置**:你可以根据需要定制插件的参数,例如滚动速度、是否禁用默认滚动事件等。 ```javascript new SmoothScroll({ speed:...
Low-rank matrix recovery via smooth rank function and its application in image restoration
首先,我们需要理解光滑函数芽(smooth function germ)的概念。在数学中,给定一个光滑函数f: U → R,其中U是R^n中的开集,并且考虑其在某一点,通常是原点0∈R^n的局部行为。光滑函数芽就是指在原点附近的这些...
**平滑滚动插件——smoothscroll.js** 在网页设计中,用户体验是一个至关重要的因素,而平滑滚动(Smooth Scroll)正是提升用户体验的一种有效方式。它可以使网页内容在滚动时以平滑、流畅的方式过渡,而不是瞬间...
在PyTorch中,损失函数(Loss function)是构建神经网络模型的核心部分,它衡量了模型预测输出与实际目标值之间的差距。损失函数的选择直接影响着模型的训练效果和收敛速度。本文将详细介绍几种常见的PyTorch损失...