
=
=
=
arduino的servo.h库_基本函数讲解
查看Arduino库文件列表,可通过Arduino IDE的“Help”菜单下的“Reference”查看。
 Arduino Libraries
Arduino Libraries
我们可以看到在Arduino标准库中的servo库,单击连接后进入,可查看servo.h文件更详细的内容。
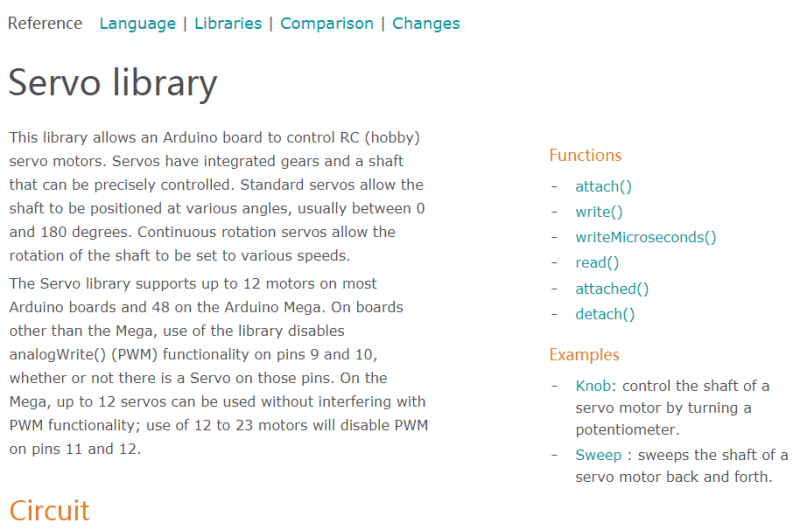 Servo library
Servo library
在上图左边是对servo库文件的基本介绍,右边是主要的函数和示例。
Servo库文件使用
我们知道舵机必须定期接收高电平脉冲控制信号才能维持转动。如果信号停止,舵机也停止。详见:舵机角度的控制。如果使用servo库来设置控制信号,就可以通过引入一些代码,实现如延迟、检查传感器、等待等功能。同时,由于servo库一直在后台运行,而舵机一直在旋转,它会经常中断其他正在执行的代码来启动那些高脉冲,带是这个切换的动作快到我们感知不到。
使用servo库来发送舵机控制信号一般需要四个步骤:
1、 首先要告诉Arduino编程器,希望在代码开始时,即setup函数之前,声明使用Servo库函数。
#include <Servo.h> // Include servo library
2、 在#include和setup函数之间为要发送的信号命名servo库的实例。如下servoLeft就是指定的实例名称。
Servo servoLeft; // Declare left servo
3、 在setup函数中,使用给出的舵机信号的名称后跟一个点,然后通过附加函数attach()调用信号引脚。这个例子告诉系统舵机信号servoLeft应该通过数字引脚13来传输。
servoLeft.attach(13); // Attach left signal to pin 13
4、writeMicroseconds()函数,用于设置脉冲持续时间。
servoLeft.writeMicroseconds(1500); // 1.5 ms stay-still signal
5、write()函数, 作用是将一个角度值写入舵机,设置轴转动的角度(该值是指角度),0为在一个方向全速转动,180为在另一个方向上全速转动,接近90为复位。
servoLeft.write(90); // set servo to mid-point
6、attached()函数,用于检测servo变量是否正确连接至Arduino对应引脚上。返回值为 true 和 false 。
servoLeft.attached()
7、detach()函数, 作用是从对应引脚上分离舵机变量。如果要将所有舵机变量分离,则使用analogWrite()函数将引脚9和引脚10用于PWM输出。
servoLeft.detach()
8、read()函数, 用于读取舵机的当前角度值(传递给上次调用write()的值)。
servoLeft.read()
=
=
=



相关推荐
ArduinoJson.h.rar
Arduinojson-5.x library file for the use of Arduino
arduino 库文件,包含相关例程 非常好用,修改也非常方便
arduino的wire.h头文件压缩包arduino的wire.h头文件压缩包arduino的wire.h头文件压缩包arduino的wire.h头文件压缩包arduino的wire.h头文件压缩包arduino的wire.h头文件压缩包arduino的wire.h头文件压缩包arduino的...
arduino DHT11库文件,用于arduino。
Visual studio Arduino IDE插件,双击即可成功安装到IDE里面,记得绑定官方ide路径
Arduino Uno Wifi板子中如果开启wifi功能,可利用ArduinoWiFi.h相关资源快速实现,本下载资源包括ArduinoWiFi.h的库文件和相关范例,另附简单配置的说明文档。为什么不能改C币设置啦,真心不想收5个币啊 T-T
servo.h,servo.cpp,keywords.txt,examples,对学习Arduino,servo等是很有用的帮助
Arduino 下语音播放函数库 用于机器人等级考试
如名称所示 Visual Micro 安装包 ,是Visual Studio 的插件 !!!! 最新版,和谐文件请搜索我的资源。。。。。
不使用Servo.h的舵机驱动
arduino源码的应用 操作源码 试试对机械手臂控制
arduino平台 SD卡文件系统 源码
aJson.zip
Arduino物联网依赖库,使用方法参见Arduino物联网三步曲—(2)OneNET远程数据监控
arduino_AFMotor库,用于控制连在ARDUINO上的电机
此为基于arduino的电机驱动程序所需库文件
DHT_sensor_library DHT温湿度传感器源码,适用于Arduino,提供DHT.h、DHT.cpp、DHT_U.h、DHT_U.cpp等源文件及样例
Arduino-Arduino-Queue.h.zip,用于ARDUIO嵌入式项目的通用C 循环队列,Arduino是一家开源软硬件公司和制造商社区。Arduino始于21世纪初,深受电子制造商的欢迎,Arduino通过开源系统提供了很多灵活性。
Simulink for programming Arduino Uno. Block write data to LCD (with internal HD77480 controller) connected to Arduino Uno board in 4-bit mode. Tested with Arduino Uno rev. 3.0, Nano and LCD 1602 LCD ...