УЙ╣у╝ў
УЙ╣у╝ў(edge)Тў»ТїЄтЏЙтЃЈт▒ђжЃет╝║т║дтЈўтїќТюђТўЙУЉЌуџёжЃетѕєсђѓСИ╗УдЂтГўтюеС║јуЏ«ТаЄСИјуЏ«ТаЄсђЂуЏ«ТаЄСИјУЃїТЎ»сђЂтї║тЪЪСИјтї║тЪЪ(тїЁТІгСИЇтљїУЅ▓тйЕ)С╣ІжЌ┤№╝їТў»тЏЙтЃЈтѕєтЅ▓сђЂу║╣уљєуЅ╣тЙЂтњїтйбуіХуЅ╣тЙЂуГЅтЏЙтЃЈтѕєТъљуџёжЄЇУдЂтЪ║уАђсђѓ
тЏЙтЃЈт╝║т║дуџёТўЙУЉЌтЈўтїќтЈ»тѕєСИ║№╝џ
- жўХУиЃтЈўтїќтЄйТЋ░№╝їтЇ│тЏЙтЃЈт╝║т║дтюеСИЇУ┐ъу╗ГтцёуџёСИцУЙ╣уџётЃЈу┤ауЂ░т║дтђ╝ТюЅуЮђТўЙУЉЌуџёти«т╝ѓ№╝Џ
- у║┐ТЮА№╝ѕт▒ІжАХ№╝ЅтЈўтїќтЄйТЋ░№╝їтЇ│тЏЙтЃЈт╝║т║дуфЂуёХС╗јСИђСИфтђ╝тЈўтїќтѕ░тЈдСИђСИфтђ╝№╝їС┐ЮТїЂСИђУЙЃт░ЈУАїуеІтљјтЈѕтЏътѕ░тјЪТЮЦуџётђ╝сђѓ
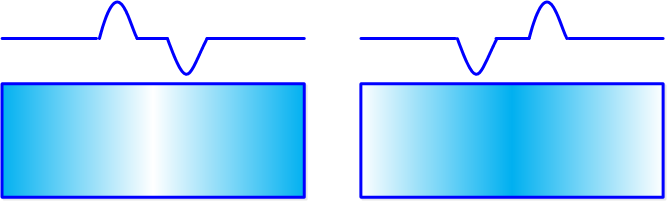
тЏЙтЃЈуџёУЙ╣у╝ўТюЅТќ╣тљЉтњїт╣Ёт║дСИцСИфт▒ъТђД,Т▓┐УЙ╣у╝ўТќ╣тљЉтЃЈу┤атЈўтїќт╣│у╝Њ,тъѓуЏ┤С║јУЙ╣у╝ўТќ╣тљЉтЃЈу┤атЈўтїќтЅДуЃѕ.УЙ╣у╝ўСИіуџёУ┐ЎуДЇтЈўтїќтЈ»С╗ЦућетЙ«тѕєу«ЌтГљТБђТхІтЄ║ТЮЦ,жђџтИИућеСИђжўХТѕќС║їжўХт»╝ТЋ░ТЮЦТБђТхІУЙ╣у╝ўсђѓ

№╝ѕa№╝Ѕ№╝ѕb№╝ЅтѕєтѕФТў»жўХУиЃтЄйТЋ░тњїт▒ІжАХтЄйТЋ░уџёС║їу╗┤тЏЙтЃЈ№╝Џ№╝ѕc№╝Ѕ№╝ѕd№╝ЅТў»жўХУиЃтњїт▒ІжАХтЄйТЋ░уџётЄйТЋ░тЏЙУ▒А№╝Џ№╝ѕe№╝Ѕ№╝ѕf№╝Ѕт»╣т║ћСИђжўХтђњТЋ░№╝Џ№╝ѕg№╝Ѕ№╝ѕh№╝ЅТў»С║їжўХтђњТЋ░сђѓ
СИђжўХт»╝ТЋ░Т│Ћ№╝џТб»т║ду«ЌтГљ
т»╣С║јтидтЏЙ№╝їтидСЙДуџёУЙ╣Тў»ТГБуџё№╝ѕућ▒ТџЌтѕ░С║«№╝Ѕ№╝їтЈ│СЙДуџёУЙ╣Тў»У┤Ъуџё№╝ѕућ▒С║«тѕ░ТџЌ№╝Ѕсђѓт»╣С║јтЈ│тЏЙ№╝їу╗ЊУ«║уЏИтЈЇсђѓтИИТЋ░жЃетѕєСИ║жЏХсђѓућеТЮЦТБђТхІУЙ╣Тў»тљдтГўтюесђѓ
Тб»т║ду«ЌтГљ Gradient operators
тЄйТЋ░f(x,y)тюе(x,y)тцёуџёТб»т║дСИ║СИђСИфтљЉжЄЈ№╝џ
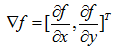
У«Ау«ЌУ┐ЎСИфтљЉжЄЈуџётцДт░ЈСИ║№╝џ

У┐ЉС╝╝СИ║:
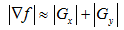
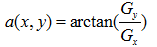
Тб»т║дуџёТќ╣тљЉУДњСИ║№╝џ
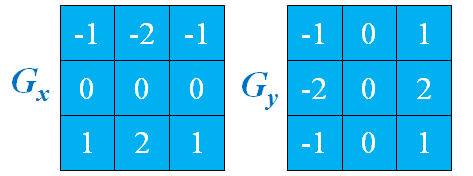
Sobelу«ЌтГљ
sobelу«ЌтГљуџёУАеуц║№╝џ

Тб»т║дт╣Ётђ╝№╝џ
ућетЇиуД»ТеАТЮ┐ТЮЦт«ъуј░№╝џ
сђљуЏИтЁ│С╗БуаЂсђЉ
ТјЦтЈБ
CV_EXPORTS_W void Sobel( InputArray src, OutputArray dst, int ddepth,
int dx, int dy, int ksize=3,
double scale=1, double delta=0,
int borderType=BORDER_DEFAULT );
Сй┐уће
/////////////////////////// Sobe l////////////////////////////////////
/// Generate grad_x and grad_y
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
/// Gradient X
//Scharr( src_gray, grad_x, ddepth, 1, 0, scale, delta, BORDER_DEFAULT );
//Calculates the first, second, third, or mixed image derivatives using an extended Sobel operator.
Sobel( src_gray, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT );
convertScaleAbs( grad_x, abs_grad_x );
/// Gradient Y
//Scharr( src_gray, grad_y, ddepth, 0, 1, scale, delta, BORDER_DEFAULT );
Sobel( src_gray, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT );
convertScaleAbs( grad_y, abs_grad_y );
/// Total Gradient (approximate)
addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad );
С║їжўХтЙ«тѕєТ│Ћ№╝џТІЅТЎ«ТІЅТќ»
С║їжўХтЙ«тѕєтюеС║«уџёСИђУЙ╣Тў»У┤Ъуџё№╝їтюеТџЌуџёСИђУЙ╣Тў»ТГБуџёсђѓтИИТЋ░жЃетѕєСИ║жЏХсђѓтЈ»С╗ЦућеТЮЦуА«т«џУЙ╣уџётЄєуА«СйЇуй«№╝їС╗ЦтЈітЃЈу┤атюеС║«уџёСИђСЙДУ┐ўТў»ТџЌуџёСИђСЙДсђѓ

LapLace ТІЅТЎ«ТІЅТќ»у«ЌтГљ
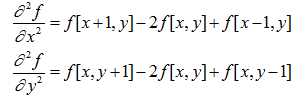
С║їу╗┤тЄйТЋ░f(x,y)уџёТІЅТЎ«ТІЅТќ»Тў»СИђСИфС║їжўХуџётЙ«тѕє№╝їт«џС╣ЅСИ║№╝џ
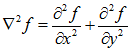
тЁХСИГ№╝џ
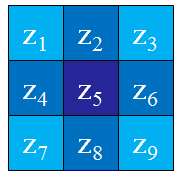
тЈ»С╗ЦућетцџуДЇТќ╣т╝Јт░єтЁХУАеуц║СИ║ТЋ░тГЌтйбт╝Јсђѓт»╣С║јСИђСИф3*3уџётї║тЪЪ№╝їу╗ЈжфїСИіУбФТјеУЇљТюђтцџуџётйбт╝ЈТў»№╝џ

т«џС╣ЅТЋ░тГЌтйбт╝ЈуџёТІЅТЎ«ТІЅТќ»УдЂТ▒ѓу│╗ТЋ░С╣Ітњїт┐ЁСИ║0
сђљуЏИтЁ│С╗БуаЂсђЉ
ТјЦтЈБ
CV_EXPORTS_W void Laplacian( InputArray src, OutputArray dst, int ddepth,
int ksize=1, double scale=1, double delta=0,
int borderType=BORDER_DEFAULT );
Сй┐уће
Mat abs_dst,dst;
int scale = 1;
int delta = 0;
int ddepth = CV_16S;
int kernel_size = 3;
Laplacian( src_gray, dst, ddepth, kernel_size, scale, delta, BORDER_DEFAULT );
convertScaleAbs( dst, abs_dst );
namedWindow( window_name2, CV_WINDOW_AUTOSIZE );
т«ъУихТЋѕТъю
тјЪтЏЙ

Т│еТёЈ№╝їУЙ╣у╝ўТБђТхІт»╣тЎфтБ░Т»ћУЙЃТЋЈТёЪ№╝їжюђУдЂтЁѕућежФўТќ»Т╗цТ│бтЎет»╣тЏЙтЃЈУ┐ЏУАїт╣│Т╗ЉсђѓтЈѓУђЃтЇџТќЄ№╝џсђљOpenCVсђЉжѓ╗тЪЪТ╗цТ│б№╝џТќ╣ТАєсђЂжФўТќ»сђЂСИГтђ╝сђЂтЈїУЙ╣Т╗цТ│б
Sobel УЙ╣у╝ўТБђТхІ
Sobelу«ЌтГљтЈ»С╗ЦуЏ┤ТјЦУ«Ау«ЌGx сђЂGyтЈ»С╗ЦТБђТхІтѕ░УЙ╣уџётГўтюе№╝їС╗ЦтЈіС╗јТџЌтѕ░С║«№╝їС╗јС║«тѕ░ТџЌуџётЈўтїќсђѓС╗ЁУ«Ау«Ќ| Gx |№╝їС║ДућЪТюђт╝║уџётЊЇт║ћТў»ТГБС║цС║јxУй┤уџёУЙ╣№╝Џ | Gy |тѕЎТў»ТГБС║цС║јyУй┤уџёУЙ╣сђѓ
LaplaceУЙ╣у╝ўТБђТхІ
ТІЅТЎ«ТІЅТќ»т»╣тЎфтБ░ТЋЈТёЪ№╝їС╝џС║ДућЪтЈїУЙ╣ТЋѕТъюсђѓСИЇУЃйТБђТхІтЄ║УЙ╣уџёТќ╣тљЉсђѓжђџтИИСИЇуЏ┤ТјЦућеС║јУЙ╣уџёТБђТхІ№╝їтЈфУхиУЙЁтіЕуџёУДњУЅ▓№╝їТБђТхІСИђСИфтЃЈу┤аТў»тюеУЙ╣уџёС║«уџёСИђУЙ╣У┐ўТў»ТџЌуџёСИђУЙ╣тѕЕућежЏХУиеУХі№╝їуА«т«џУЙ╣уџёСйЇуй«сђѓ
тѕєС║Фтѕ░№╝џ




уЏИтЁ│ТјеУЇљ
тГдС╣аугћУ«░python+opencvтѕЕућеТІЅТЎ«ТІЅТќ»у«ЌтГљжћљтїќСИјsobelу«ЌтГљжћљтїќ№╝ѕcsdn№╝ЅРђћРђћРђћРђћуеІт║Ј
openCV+VS2008т«ъуј░тЏЙтЃЈТ╗цТ│бсђЂжћљтїќlaplaceу«ЌтГљсђЂУЙ╣у╝ўТЈљтЈќsobelу«ЌтГљcannyу«ЌтГљсђЂkmeansжбюУЅ▓УЂџу▒╗сђЂжбюУЅ▓уЕ║жЌ┤жЄЈтїќ
тЪ║С║јopencv1.0 VC++6.0MFCтєЎуџёт«їТЋ┤уџётЏЙтЃЈтцёуљєуеІт║Ј№╝їтіЪУЃйжйљтЁе№╝ѕтЏЙтЃЈтЪ║ТюгТЊЇСйю№╝џТЌІУйгсђЂжЋютЃЈсђЂтЈЇУЅ▓сђЂтЏЙтЃЈС║їтђ╝тїќсђЂтЏЙтЃЈтѕєтЅ▓сђЂтЏЙтЃЈтбът╝║сђЂуЂ░т║дуЏ┤Тќ╣тЏЙтЮЄУААсђЂу║┐ТђДтЈўТЇбсђЂуЂ░т║дТІЅС╝И№╝ЅсђЂУЙ╣у╝ўТБђТхІ№╝ѕprewittу«ЌтГљсђЂsobelу«ЌтГљсђЂcanny...
тЪ║С║јopencvсђЂpythonFlaskТАєТъХуџёУ«Ау«ЌТю║УДєУДЅтЈ»УДєтїќуйЉуФЎсђѓтїЁТІгСйєСИЇжЎљС║јС╝йжЕгуЪФТГБсђЂуЂ░т║дтцёуљєсђЂтЏЙтЃЈу┐╗УйгуГЅС║їтЇЂтцџуДЇтЏЙтЃЈтцёуљєтіЪУЃй тєЁуй«тіЪУЃй тЪ║уАђтіЪУЃй ућеТѕиу«Ауљє№╝џућеТѕиТў»у│╗у╗ЪТЊЇСйюУђЁ... жћљтїќуЕ║жЌ┤Т╗цТ│бтЎе№╝џsobelу«ЌтГљсђЂТІЅТЎ«ТІЅТќ»у«ЌтГљ
т»╣тЏЙтЃЈУ┐ЏУАїТІЅТЎ«ТІЅТќ»тЈўТЇб№╝їУЙ╣у╝ўТБђТхІ№╝їуј░ТюЅSobelу«ЌтГљУ«Ау«ЌС║їжўХти«тѕє№╝їтєЇућ▒тєЁТаИтЂџтЇиуД»
ТІЅТЎ«ТІЅТќ»у«ЌтГљ№╝џ import cv2 as cv import numpy as np # тЏЙтЃЈТб»т║д№╝ѕућ▒x,yТќ╣тљЉСИіуџётЂЈт»╝ТЋ░тњїтЂЈуД╗ТъёТѕљ№╝Ѕ№╝їТюЅСИђжўХт»╝ТЋ░№╝ѕsobelу«ЌтГљ№╝ЅтњїС║їжўХт»╝ТЋ░№╝ѕLaplaceу«ЌтГљ№╝Ѕ # ућеС║јТ▒ѓУДБтЏЙтЃЈУЙ╣у╝ў№╝їСИђжўХуџёТъЂтцДтђ╝№╝їС║їжўХуџёжЏХуѓ╣ # СИђжўХтЂЈ...
Т│е№╝џтйЊуёХТѕЉС╗гС╣ЪтЈ»С╗Цcv.filter2DтЉйС╗цТЮЦmakeСИђСИфТІЅТЎ«ТІЅТќ»у«ЌтГљ№╝џ kernel = np.array([[0,-1,0],[-1,4,-1],[0,-1,0]]) dst = cv.filter2D(image,cv.CV_32F,kernel) dst = cv.convertScaleAbs(dst) cv.imshow(...
У»ду╗єУ«▓УДБС║єтЇиуД»Тдѓт┐х№╝їтЇиуД»тдѓСйЋтиЦСйю№╝їС╗ЦтЈітИИУДЂуџёRobertу«ЌтГљсђЂSobelу«ЌтГљтњїТІЅТЎ«ТІЅТќ»у«ЌтГљ№╝їУЄфт«џС╣ЅтЇиуД»уГЅсђѓТгбУ┐јСИІУййтГдС╣асђѓ
у╗╝тљѕС║єтЄауДЇТБђТхІТќ╣Т│Ћ№╝їvs2013у╝ќУ»ЉжђџУ┐ЄсђѓTenengradТб»т║дТќ╣Т│ЋтѕЕућеSobelу«ЌтГљтѕєтѕФУ«Ау«ЌТ░┤т╣│тњїтъѓуЏ┤Тќ╣тљЉуџёТб»т║д№╝їтљїСИђтю║ТЎ»СИІТб»т║дтђ╝УХіжФў№╝їтЏЙтЃЈУХіТИЁТЎ░сђѓтЏЙтЃЈТеАу│іСИјтљдуџёСИђуДЇТБђТхІТќ╣Т│Ћ№╝їУ»ЦТќ╣Т│ЋСИ╗УдЂжЄЄућетЏЙтЃЈуџёТІЅТЎ«ТІЅТќ»тЇиуД»ТЊЇСйюсђѓ
УЙ╣у╝ўТЈљтЈќСйатЈѕтЈ»С╗ЦТІЅТЎ«ТІЅТќ»жћљтїќ№╝їsobelу«ЌтГљ№╝їRobertу«ЌтГљ№╝їscharrу«ЌтГљ№╝їcandyТБђТхІсђѓ С║јТў»ТѕЉт╣▓УёєТііУ┐ЎС║Џт«ъуј░СИђСИфжЂЇ№╝їтєЇТЁбТЁбжђЅТІЕтЦйС║єсђѓ С║јТў»УЄфт«ъуј░С║єС╗ЦСИІу«ЌТ│Ћ№╝џ 1. тйЕУЅ▓тЏЙтЃЈУйгуЂ░т║д 2. тЏЙтЃЈу┐╗Уйг№╝їУјитЙЌУ┤ЪуЅЄ 3. у║┐ТђД...
УЙ╣у╝ўТЈљтЈќСйатЈѕтЈ»С╗ЦТІЅТЎ«ТІЅТќ»жћљтїќ№╝їsobelу«ЌтГљ№╝їRobertу«ЌтГљ№╝їscharrу«ЌтГљ№╝їcandyТБђТхІсђѓ С║јТў»ТѕЉт╣▓УёєТііУ┐ЎС║Џт«ъуј░СИђСИфжЂЇ№╝їтєЇТЁбТЁбжђЅТІЕтЦйС║єсђѓ С║јТў»УЄфт«ъуј░С║єС╗ЦСИІу«ЌТ│Ћ№╝џ 1. тйЕУЅ▓тЏЙтЃЈУйгуЂ░т║д 2. тЏЙтЃЈу┐╗Уйг№╝їУјитЙЌУ┤ЪуЅЄ 3. у║┐ТђД...
тЪ║С║јpythonуј»тбЃС╗ЦтЈіopencvуџётЅЇТЈљСИІ№╝їт»╣тЏЙтЃЈУ┐ЏУАїтцёуљє№╝їТХЅтЈітѕ░у╗ЪУ«АуЂ░т║ду║ДтЃЈу┤ауѓ╣ТЋ░сђЂт╣ѓтЙІтЈўТЇбсђЂтЈїу║┐ТђДТЈњтђ╝ТћЙтцДу╝Ет░ЈсђЂуЏ┤Тќ╣тЏЙтЮЄУААтїќтцёуљєт╣ХТўЙуц║сђЂтЮЄтђ╝Т╗цТ│бсђЂТІЅТЎ«ТІЅТќ»у«ЌтГљтњїSobelу«ЌтГљуГЅтцёуљєТЊЇСйюсђѓ
СИђСИфтЏЙтЃЈТ╗цТ│бтцёуљєуџёТ╝ћуц║уеІт║Ј №╝їт«ъуј░тЏЙтЃЈуџётЄауДЇуЕ║тЪЪТеАТЮ┐Тќ╣Т│Ћ...тЮЄтђ╝Т╗цТ│б №╝їСИГтђ╝Т╗цТ│б №╝їжФўТќ»Т╗цТ│б №╝їsobelу«ЌтГљ№╝їlaplaceу«ЌтГљ№╝їТ╗цТ│бтЈѓТЋ░тЈ»У░Ѓ уеІт║ЈуЋїжЮбтЪ║С║јMFC,VC6.0 Т╗цТ│бтЄйТЋ░тЪ║С║јopencv1.0 ps№╝їуеІт║ЈтГўтюеbug,ТЄњтЙЌТћ╣С║є....
тГдС╣аopencv(СИГТќЄуЅѕ) ТИЁтЇјтцДтГдтЄ║уЅѕуцЙ тЄ║уЅѕтЅЇУеђ У»ЉУђЁт║Ј тєЎтюетЅЇжЮбуџёУ»Ю тЅЇУеђ угг1уФа ТдѓУ┐░ С╗ђС╣ѕТў»OpenCV OpenCVуџёт║ћућежбєтЪЪ С╗ђС╣ѕТў»У«Ау«ЌТю║УДєУДЅ OpenCVуџёУхиТ║љ СИІУййтњїт«ЅУБЁOpenCV жђџУ┐ЄSVNУјитЈќТюђТќ░уџёOpenCVС╗БуаЂ ТЏ┤тцџOpenCVТќЄТАБ ...
т░║т»ИУ░ЃТЋ┤ тЏЙтЃЈжЄЉтГЌтАћ жўѕтђ╝тїќ у╗ЃС╣а угг6уФа тЏЙтЃЈтЈўТЇб ТдѓУ┐░ тЇиуД» Тб»т║дтњїSobelт»╝ ТЋ░ ТІЅТЎ«ТІЅТќ»тЈўТЇб Cannyу«ЌтГљ жюЇтцФтЈўТЇб жЄЇТўат░ё ТІЅС╝ИсђЂТћХу╝ЕсђЂТЅГТЏ▓тњїТЌІУйг CartToPolarСИјPolarToCart LogPolar уд╗ТЋБтѓЁжЄїтЈХтЈўТЇб(DFT) уд╗ТЋБСйЎт╝д...
code_033 | [ТІЅТЎ«ТІЅТќ»у«ЌтГљ(С║їжўХт»╝ТЋ░у«ЌтГљ)](python/code_033/opencv_033.py) | Рюћ№ИЈ code_034 | [тЏЙтЃЈжћљтїќ](python/code_034/opencv_034.py) | Рюћ№ИЈ code_035 | [USM жћљтїќтбът╝║у«ЌТ│Ћ](python/code_035/opencv_035.py) |...
тЏЙтЃЈтцёуљєСИіУ»ЙугћУ«░№╝їтЁЦжЌетЪ║уАђуЪЦУ»єуѓ╣ТЋ┤тљѕсђѓСЙІтдѓтЏЙтЃЈУЁљУџђсђЂт╝ђУ┐љу«ЌсђЂжЌГУ┐љу«Ќ№╝їуц╝тИйТЊЇСйю№╝їтЏЙтЃЈУъЇтљѕ№╝їтЏЙтЃЈтЈЇУйг№╝їsobelу«ЌтГљТдѓт┐хсђЂТІЅТЎ«ТІЅТќ»жЄЉтГЌтАћсђЂУЙ╣у╝ўТБђТхІуГЅУ»ИтцџтєЁт«╣сђѓ
С║їжўХт»╝ТЋ░ РђћТІЅТЎ«ТІЅТќ»у«ЌтГљу│╗ТЋ░тњїСИ║0 СИђжўХт»╝ТЋ░ import cv2 as cv import numpy as np def sobel_demo(image): # grad_x = cv.Scharr(image, cv.CV_32F, 1, 0) grad_y = cv.Scharr(image, cv.CV_32F, 0, 1) # ...
13.1.4 ТІЅТЎ«ТІЅТќ»у«ЌтГљ 503 13.2 HoughтЈўТЇб 509 13.2.1 HoughтЈўТЇбуџётјЪуљє 509 13.2.2 у╝ќуеІт«ъуј░ 515 13.3 уДЇтГљу«ЌТ│Ћ 520 13.3.1 у«ЌТ│ЋС╗Іу╗Ї 520 13.3.2 у╝ќуеІт«ъуј░ 523 13.4 Уй«т╗ЊУиЪУИф 526 13.4.1 тї║тЪЪУАеуц║Тќ╣Т│Ћ 526 13.4.2 тЇЋ...